As succesful as robots are, the unique animals after which they are usually designed are at all times a lot, a lot better. That’s partly as a result of it’s troublesome to discover ways to stroll like a canine straight from a canine — however this research from Google’s AI labs make it significantly simpler.
The aim of this analysis, a collaboration with UC Berkeley, was to discover a strategy to effectively and mechanically switch “agile behaviors” like a light-footed trot or spin from their supply ( canine) to a quadrupedal robotic. This type of factor has been completed earlier than, however because the researchers’ weblog publish factors out, the established coaching course of can usually “require a substantial amount of professional perception, and sometimes includes a prolonged reward tuning course of for every desired ability.”That doesn’t scale nicely, naturally, however that guide tuning is important to ensure the animal’s actions are approximated nicely by the robotic. Even a really doglike robotic isn’t truly a canine, and the best way a canine strikes might not be precisely the best way the robotic ought to, main the latter to fall down, lock up or in any other case fail.
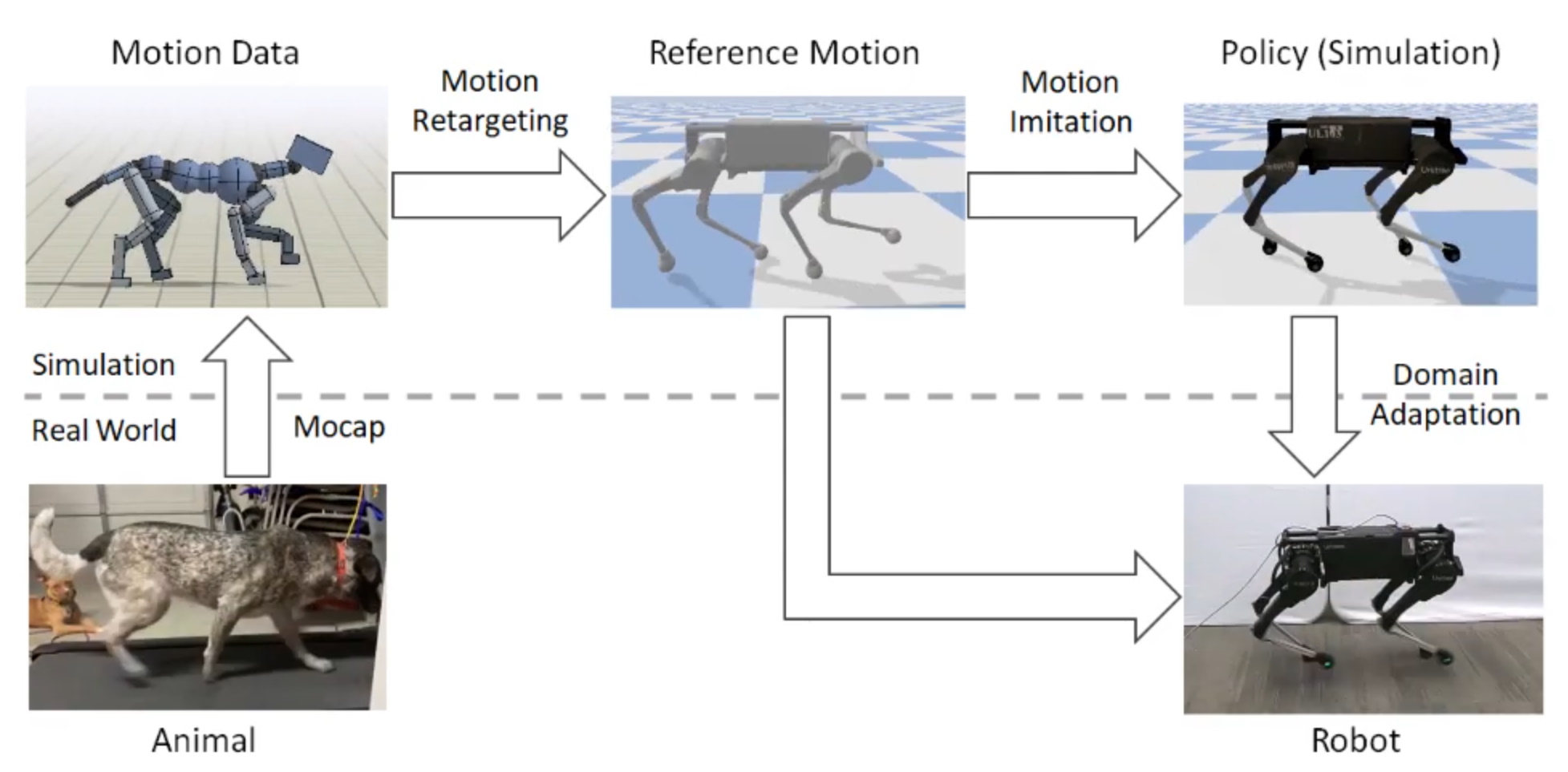 The Google AI venture addresses this by including a little bit of managed chaos to the conventional order of issues. Ordinarily, the canine’s motions can be captured and key factors like toes and joints can be rigorously tracked. These factors can be approximated to the robotic’s in a digital simulation, the place a digital model of the robotic makes an attempt to mimic the motions of the canine with its personal, studying because it goes.
The Google AI venture addresses this by including a little bit of managed chaos to the conventional order of issues. Ordinarily, the canine’s motions can be captured and key factors like toes and joints can be rigorously tracked. These factors can be approximated to the robotic’s in a digital simulation, the place a digital model of the robotic makes an attempt to mimic the motions of the canine with its personal, studying because it goes.To this point, so good, however the actual drawback comes while you attempt to use the outcomes of that simulation to regulate an precise robotic. The actual world isn’t a 2D aircraft with idealized friction guidelines and all that. Sadly, that implies that uncorrected simulation-based gaits are likely to stroll a robotic proper into the bottom.
To stop this, the researchers launched a component of randomness to the bodily parameters used within the simulation, making the digital robotic weigh extra, or have weaker motors, or expertise larger friction with the bottom. This made the machine studying mannequin describing find out how to stroll should account for every kind of small variances and the issues they create down the road — and find out how to counteract them.
 Studying to accommodate for that randomness made the realized strolling technique much more sturdy in the actual world, resulting in a satisfactory imitation of the goal canine stroll, and much more difficult strikes like turns and spins, with none guide intervention and solely a little bit additional digital coaching.
Studying to accommodate for that randomness made the realized strolling technique much more sturdy in the actual world, resulting in a satisfactory imitation of the goal canine stroll, and much more difficult strikes like turns and spins, with none guide intervention and solely a little bit additional digital coaching.Naturally guide tweaking may nonetheless be added to the combination if desired, however because it stands it is a giant enchancment over what may beforehand be completed completely mechanically.
In one other analysis venture described in the identical publish, one other set of researchers describe a robotic educating itself to stroll by itself, however imbued with the intelligence to keep away from strolling exterior its designated space and to select itself up when it falls. With these fundamental abilities baked in, the robotic was in a position to amble round its coaching space repeatedly with no human intervention, studying fairly respectable locomotion abilities.
The paper on studying agile behaviors from animals will be learn here, whereas the one on robots studying to stroll on their very own (a collaboration with Berkeley and the Georgia Institute of Expertise) is here.
Source link
Comments
Post a Comment